Hi! My names Tahseen Hussain
I'm a UCSD ECE Grad student, I love to build and see my creations come to life! See some of them below 😎

I'm a UCSD ECE Grad student, I love to build and see my creations come to life! See some of them below 😎

Reduse, Reuse, Recycle, should really have reuse first!
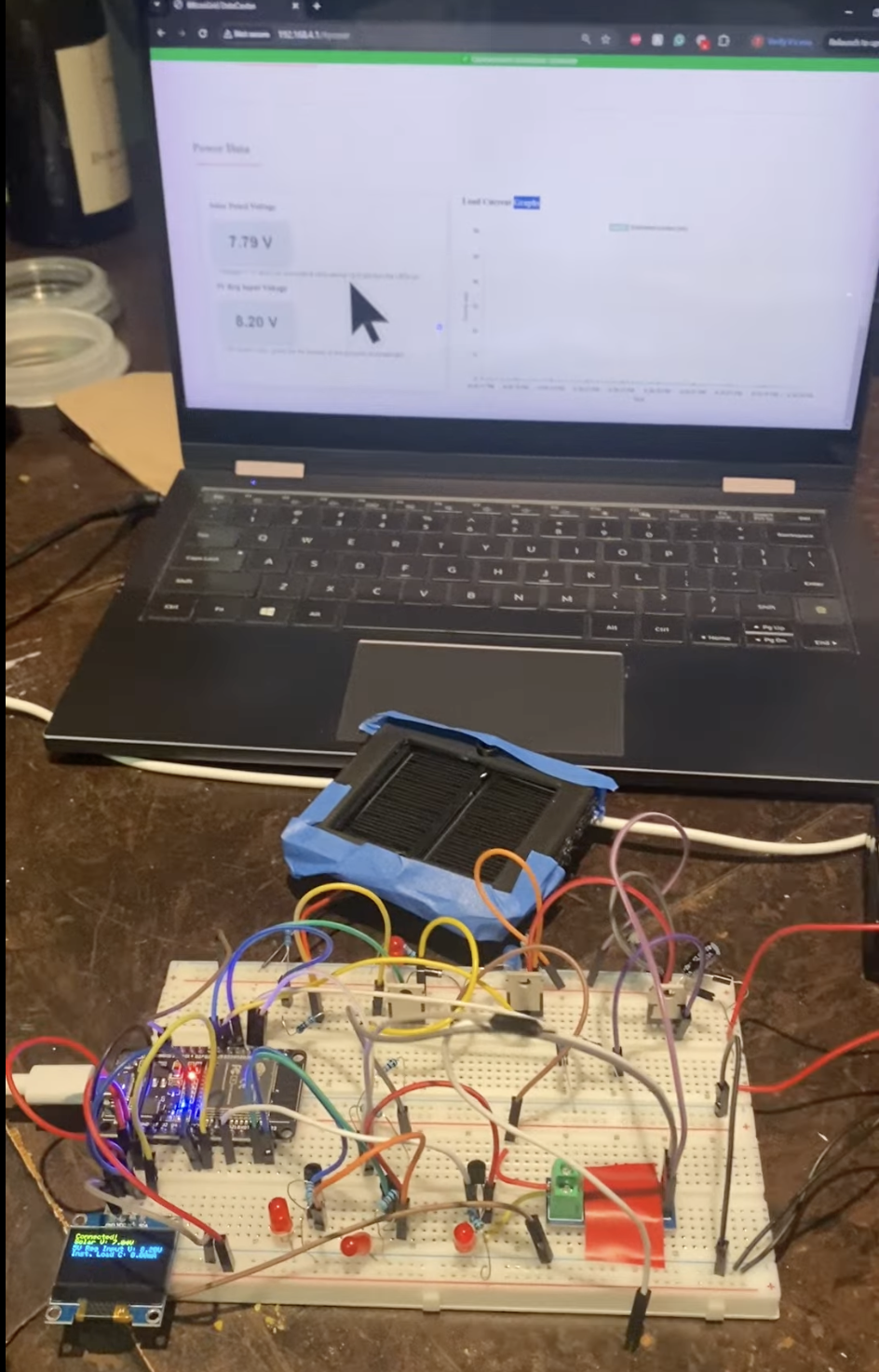
Over 1.2 billion smartphones are shipped yearly, with an average upgrade cycle of just two years. The Junkyard Computing Project repurposes discarded Pixel phones and old Qualcomm boards! Leveraging their high performance processors, networking capabilities, and built in power supplies.
As part of the Junkyard Computing project, we're building a federated multi-cluster platform using Karmada to coordinate a unified control plane, and we are using Grafana and Prometheus for our observability stack
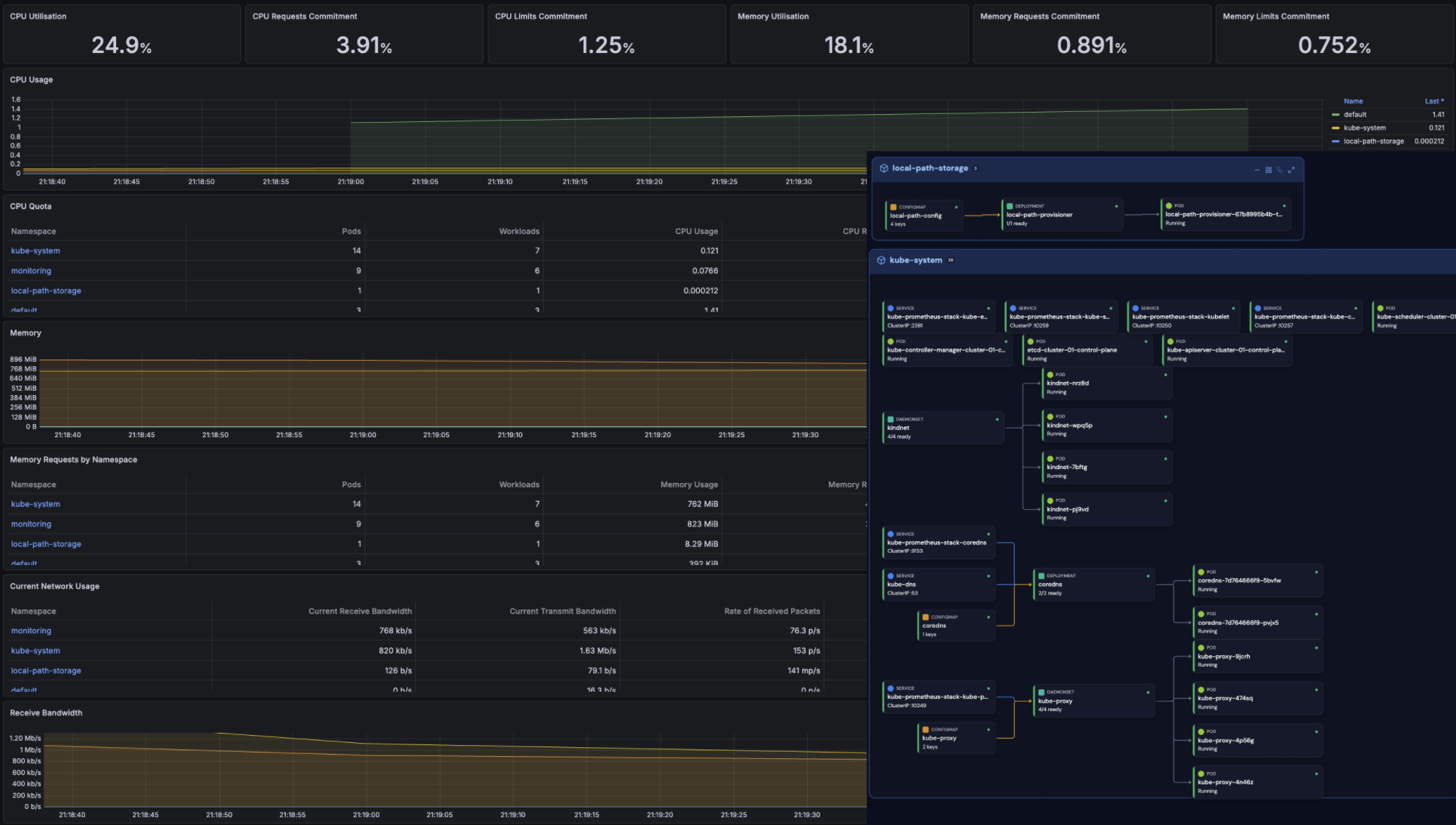
Getting Prometheus and Grafana running on KinD was one of my first tasks! It was super exciting to learn about how these tools interact and building these clusters configuring scrape targets, understanding how metrics flow from nodes and pods up through the stack, and building dashboards that tell you useful information about cluster health and resource usage.
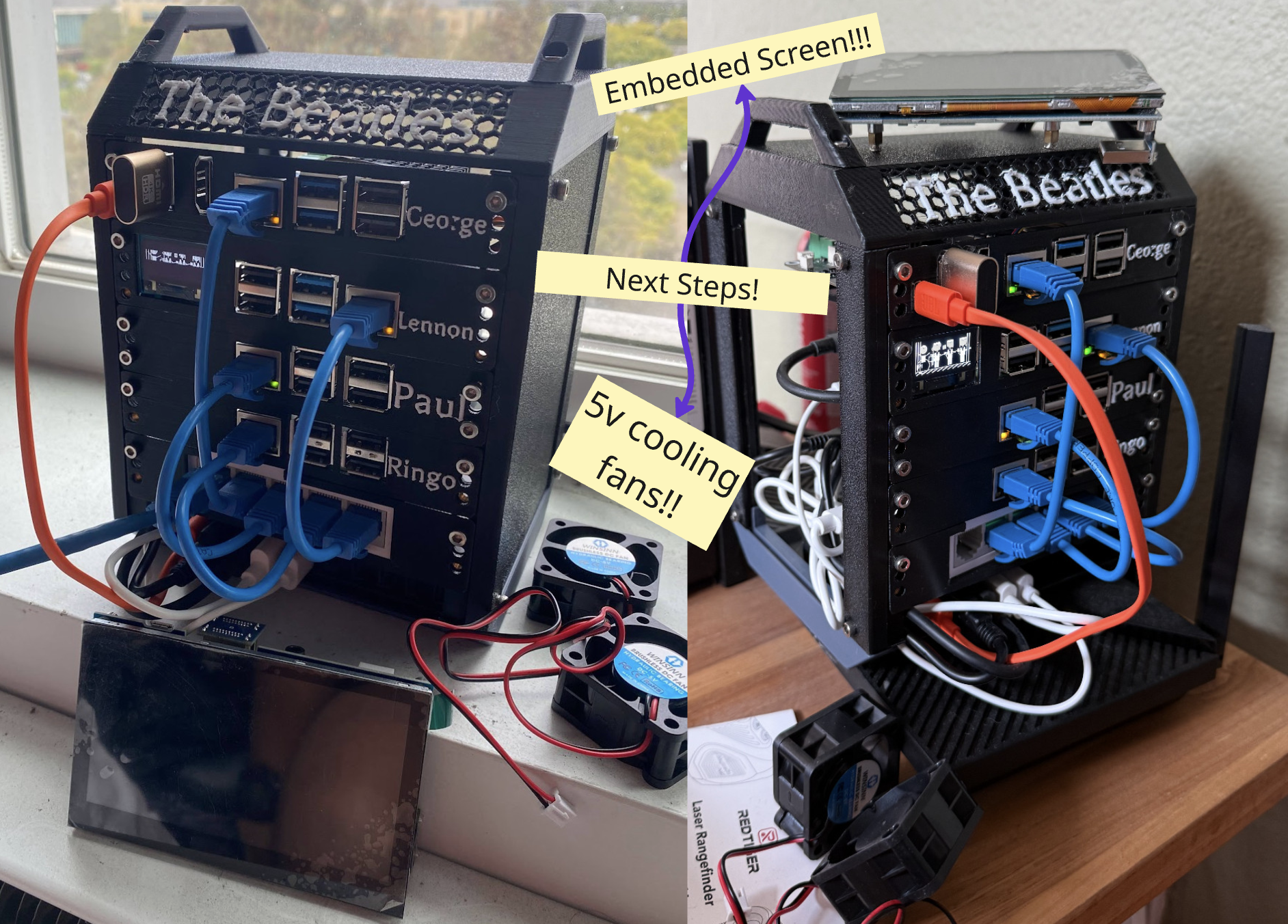
Started as a pile of Raspberry Pis I accumulated over the years as a TA for project classes and had no idea what to do with. Shoved them in a rack case, wired them up over ethernet, and now it's a home lab. Running a DNS sinkhole for ad filtering and OpenWRT (Router OS) since UCSD Spectrum WiFi fights me brutally whenever I do any networking projects
The whole thing is held together by ethernet cables of very questionable length. Why do I have a 20ft ethernet cable? I don't know either, but I did!
I was messing with some low level memory packages and found this pretty cool one, the nohang daemon is pretty cool way for OOM prevention!

Robots that fight each other... surely nothing can go wrong
Doomba is my very first combat robot design. It features 2 Repeat Robotics Brushed Mk2 Motors for driving, 1 Brushless DC Motor to power the weapon. Electronics wise, currently it's outfitted with a 2S 550mAh Battery, 1 radio transmitter, 1 Brushless ESC, and 1 Bi-directional Brushed ESC.
This robot was designed utilizing OnShape for chassis and any additional parts, and KiCad for the electronics Currently, I have a PCB to integrate the DC motors driver, a accelerometer, an ESP32-S3 chip, and a few more features to be used for the board.

Check out the interactive model of my first combat robot!
Normal roombas are expensive. This is also still expensive, but I made this one
The below model is interative, take a peak the board I designed!
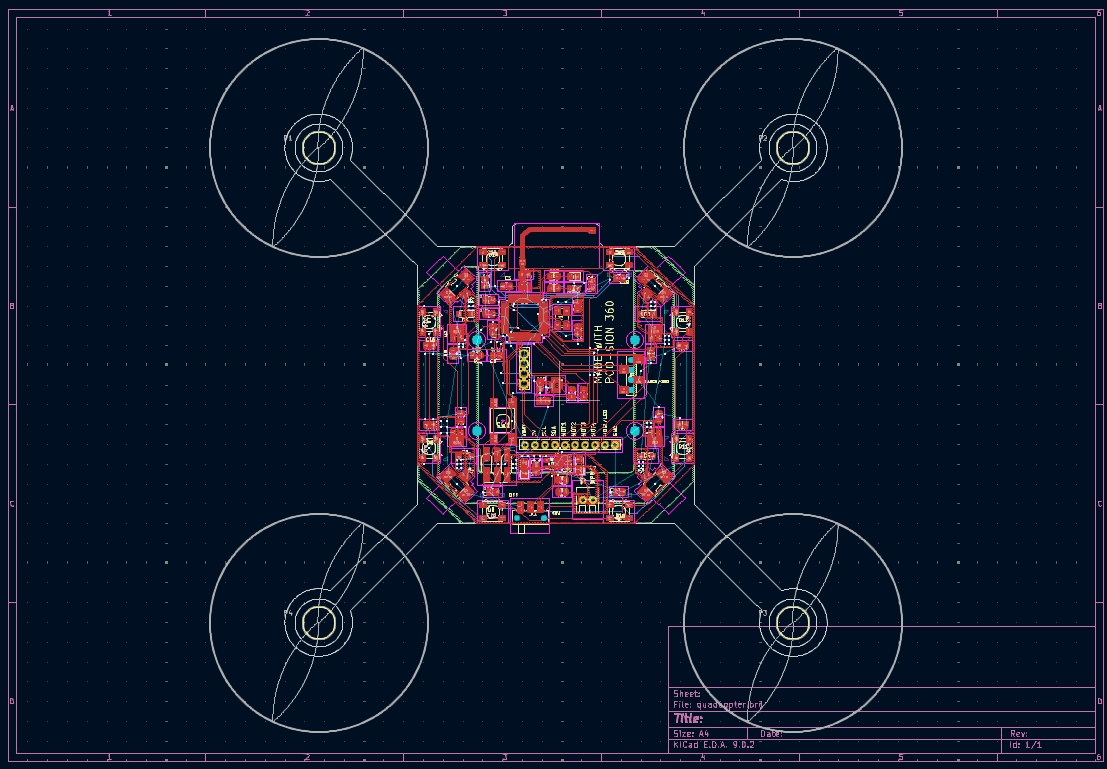
Sure, you have SkyDio, or DJI, or you can have me
The beautiful piece of metal is a custom PCB integrating flight control, power distribution, and sensor fusion into a single compact board. It runs on a lightweight DC motors tuned for responsive flight.
Designed in Fusion (regrettably...) and built from scratch, the board incorporates an IMU for stabilization, an ESP32 for wireless control, and custom firmware written in C++. Check out the full source on GitHub!
This was a super exciting but difficult project. From PCB Design to the low level firmware design. Many exciting challenges throughout that pushed me as an engineer! The biggest was PID tuning process. We went with a iterative (and painful) gain tuning process. Check out the github (and our journey) here!